Take
- Analog
- 2023-09-23 21:19:18
Cobbling up precision temperature control systems typically poses two particular design challenges:
Accurate and cost-effective sensing of the temperature to be controlled.Closure of the feedback loop between temperatures sensor and heat and/or cooling source with control circuitry, including both high gain and dynamic stabilization that compensates for large time delays and phase lags common in thermal control systems.Wow the engineering world with your unique design: Design Ideas Submission Guide
Figure 1 shows a thermostat design that incorporates unusual (analog) solutions to these two challenges.
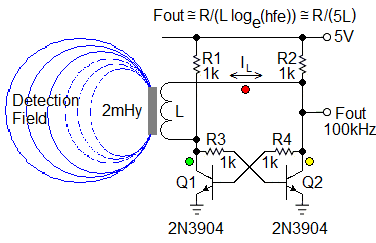
One is a variable sample-rate (adjustable via Rf) ∆Vbe temperature sensor based on an ordinary self-calibrated small-signal transistor (2N3904). The other is a nonlinear convergence-forcing TBH (take-back-half) integrating thermal feedback loop.




Figure 1 Delta-Vbe temperature sensor combined with take-back-half integrating control loop.
Here’s how it works: IC2a and IC2b form a variable-frequency (1Hz to 100Hz) square wave oscillator controlled by pot Rf. This drives the 2N3904’s delta-Vbe temperature measurement cycle. IC2b pin 1 modulates temperature sensor bias current in a 10:1 (ideally 10.0255:1) ratio to generate a PTAT (proportional to absolute temperature) peak-to-peak AC signal of:
Vt = log10(10.0255)/5050 = 198.24 µV/oK.
This is amplified by IC5b by a gain factor of 10.091:1, to produce a net PTAT signal of:
198.24 µV/oK * 10.091 = 2000.4 µV/oK.
This 2 mV/oK AC signal is synchronously rectified by IC2a, with the resultant DC applied to integrator amplifier IC5a as temperature control feedback.
IC5a accumulates the difference between the PTAT signal and the Vs (temperature setpoint) voltage with an integration time constant of F. F is inversely proportional to the IC2a-b oscillation frequency set by Rf, thus proportional to Rf, and therefore variable over a range of 1 to 100 seconds. More on this later as we explore how the PTAT – Vs feedback signal is used to control system temperature.
Vs is programmed by the IC4 precision 5.00 V reference as scaled by the Rb/(Ra + Rb) voltage divider according to this relation:
Ts = Setpoint temperature (oK) = (oC + 273.1) = 500Vs = 500(5(Rb/(Ra + Rb))),Rb/(Ra + Rb) = Ts/2500,2500Rb = Ts(Ra + Rb),Rb(2500 – Ts) = RaTs, andRb = RaTs/(2500 – Ts).For some examples (using standard resistor values), if Ra = 110k:0oC requires Rb = 13.5k,25oC requires Rb = 14.9k,30oC requires Rb = 15.2k,50oC requires Rb = 16.4k,75oC requires Rb = 17.8k,100oC requires Rb = 19.3k,etc.
Which brings us to the question of how the PTAT – Vs difference signal integrated by IC5a is converted to a heater control signal.
According to analog guru Jim Williams, “The unfortunate relationship between servo systems and oscillators is very apparent in thermal control systems.” (Linear Applications Handbook, 1990). High-performance temperature control is certainly one of those topics that look easy in theory but turns out not so easy in practice. Heater-load thermal time constants conspire with heater-sensor response delays to produce wild oscillatory instability where precision thermostasis was intended.
Over the years, many feedback techniques and control strategies have been devised to tame the dynamic-stability gremlins that inhabit temperature-control servo loops. Many of these ideas incorporate integration of the temperature-control error term (TS − T) to force the control loop error to converge toward zero.
The method implemented in Figure 1 is such an error-term-integrating scheme. I have used it in many applications over the decades and have named it TBH = “take-back-half”.
It has other applications besides temperature control. One example can be seen here and another here.
Perhaps the best write-up of TBH principles and performance, including a computed comparison of it versus the classic proportional-integral-differential (PID) algorithm, appears in third edition of “The Art of Electronics” by Paul Horowitz (pages 1075 to 1077).
Stephen Woodward’s relationship with EDN’s DI column goes back quite a long way. Nearly 100 submissions have been accepted since his first contribution back in 1974.
Related Content
Generate proportional feedback from a bang-bang sensor with a “take back half” controllerTransistor ∆VBE-based oscillator measures absolute temperatureSelf-heated ∆Vbe transistor thermostat needs no calibrationTake由Voice of the EngineerAnalogColumn releasethank you for your recognition of Voice of the Engineer and for our original works As well as the favor of the article, you are very welcome to share it on your personal website or circle of friends, but please indicate the source of the article when reprinting it.“Take”